





主要特征:
橋架固定,工作臺移動的固定橋式結構,秀山力德三次元,為整機提供了更穩定可靠的精度基礎,并確保高速運行時,振動對精度的影響低
陶瓷Z軸、全花崗巖結構,為計量室環境下的測量提供了穩定的高精度
中心驅動系統減少偏擺和扭轉,力德三次元維護,Y向光柵安裝于工作臺的中央,阿貝誤差小
Y向采用燕尾導軌結構,提高了機器的精度和重復性
柔性同步帶系統,兼顧柔性嚙合與剛性軸向傳動的優點,確保高加速度時定位到位從而提高運動的平穩性
Z向采用可調式氣動平衡設計,提高了機器的動態性能,提升Z軸安全性
標配溫度傳感器,自動補償由于溫度變化而引起的誤差
采用HEIDENHAIN高分辨率金質光柵,其熱膨脹系數獲得PTB認證


以上重慶欣晟泰為您提供參考





1) 力變形誤差
在實際的坐標測量中,雖然各個部件具有較高的剛性,但力變形是不可避免的。
2) 溫度誤差
溫度誤差又稱為熱誤差或熱變形誤差,它不是溫度本身的誤差,而是由于溫度因素而引起的幾何參數的測量誤差。形成溫度誤差的主要因素是被測物體和測量儀器的溫度偏離20℃或被測物體的尺寸和儀器的性能隨溫度變化。誤差修正分為實時修正和非實時修正。由于系統誤差不便進行實時修正,在實踐中常常只對溫度誤差進行實時修正。橫臂梁式三坐標測量機的穩定誤差可表示為:
?l=l(αp-αs)?t式中:
αp,αs被測工件及橫臂梁材料的線膨脹系數,1/℃ ?t橫臂梁材料相對于標準溫度(20℃)的偏差, l橫臂梁長度。
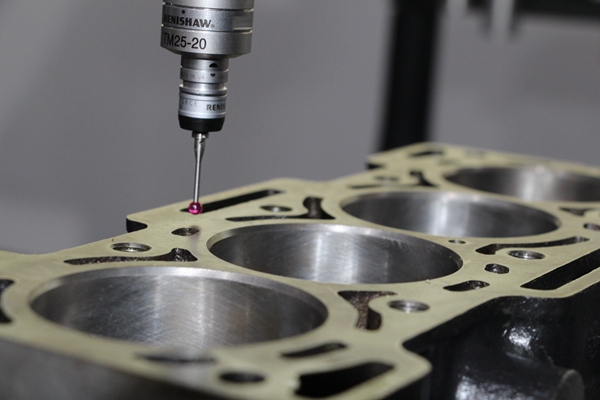
3) 探測誤差
三坐標測頭的探測誤差是影響測量不確定度的重要因素,不同的測頭探測誤差也不同,一般包括瞄準誤差、測端等效直徑的影響、各向異性、附件誤差等。
4) 動態誤差
動態誤差必然存在于動態測量中,對其研究起步較晚且過程復雜,是近年來的研究熱點。動態誤差一般分為兩類:一類是由組成系統的各部分元件本身的靜態和動態誤差性能不理想而引起的動態誤差,另一類是由系統內外各種干擾引起的動態誤差。
5) 幾何誤差
三坐標測量機由相互垂直的3個軸組成,力德三次元回收,各軸由滑塊-導軌系統實現直線運動。由于制造偏差,力德三次元校準,滑塊在軸向有定位誤差,在另兩個方向上有直線度誤差及3個方向的角擺誤差。又由于裝配等因素造成3個軸之間存在垂直度誤差,三坐標測量機共有21項幾何誤差。

以上重慶欣晟泰為您提供參考
您好,歡迎蒞臨禮之鑫,歡迎咨詢...
 觸屏版二維碼 |





